Feedbacksystemet har flere fordele i forhold til konventionelle systemer. Det hjælper med at forbedre udgangsforstærkningen af kredsløbet og øger kredsløbets lineære respons. Det reducerer også chancerne for signalforvrængninger, der primært opstår på grund af støjsignaler.
Feedback-systemer bruges mest i forstærkerkredsløb, output-baserede kontrolsystemer og oscillatorkredsløb. Feedbacksystemer har to typer: Positiv feedback og Negativ feedback. Denne artikel vil fokusere meget på den sidstnævnte type feedback.
Hurtig oversigt:
- Hvad er negativt feedback-system i elektronik
- Negativ feedback kredsløb
- Negativ feedback-overførselsfunktion
- Negativ feedback i operationsforstærkere
- Eksempel 1
- Eksempel 2
- Eksempel 3
- Forskellen mellem positive og negative feedbacksystemer
- Anvendelser og egenskaber for negativt feedback-system
- Effekt af negativ feedback på båndbredde
- Konklusion
Hvad er negativt feedback-system i elektronik
Negativ feedback i et elektrisk kredsløb er en kontrolmekanisme, der stabiliserer og regulerer det elektriske kredsløbs operationer. Kredsløb med integrerede negative feedback-systemer tager et udgangssignal og giver det til input som en faseoppositionssignal (inverteret). . Dette feedbacksystem reducerer eventuelle afvigelser eller fejl i udgangssignalerne.
Negativ feedback kaldes også degenerativ feedback . Ved negativ feedback trækkes udgangssignalet, der kommer som feedback, fra inputreferencesignalet. Udgangen resulterer i en fejl kendt som feedback gevinst . Dette fejlsignal, der genereres efter subtraktion, vil modificere systemets respons tilsvarende. Hvis systemets forstærkning er positiv, skal feedbacksignalet, der kommer fra udgangen, trækkes fra inputreferencesignalet for at bevare feedbacken som negativ.
Når negativ feedback er trukket fra fra referenceindgangen gør det systemet mere stabilt. Lad os sige, at der er et system, der viser usædvanlig adfærd - for at imødegå denne ændring vil systemet generere et udgangssignal. Dette udgangs- eller feedbacksignal modvirker inputsignalet - modificerer inputtet i overensstemmelse hermed for at få det overordnede system til at køre effektivt.
Negativ feedback kredsløb
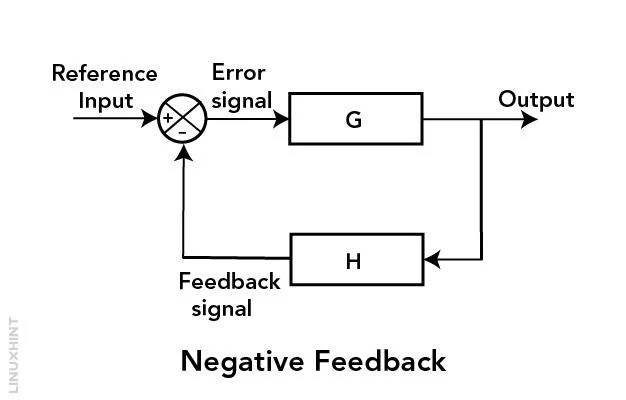
Det negative feedback-kredsløb er illustreret på billedet nedenfor. Her kan du se et udgangssignal tages tilbage til inputsiden som feedback. På inputsiden genereres en forskel mellem referencesignalet og feedbacksignalforskellen, som så driver systemet videre.
1. Komponenter : Kredsløbet består af to hovedkomponenter:
- En forstærker med forstærkning G.
- En feedbackloop med feedbackfaktor β.
Indgangssignalet er V i og udgangen af forstærkeren er V ud .
2. Summing Junction : Ved forstærkerens indgang er der et summeringspunkt (ofte repræsenteret af en cirkel med et minustegn indeni). Dette kryds trækker feedbacksignalet fra referenceindgangen. Den subtraherede del er produktet af feedbackfaktoren β og output Vout - så fejlsignalet er V i – bV ud .
3. Feedback loop : Dette fejlsignal (V i – bV ud ) er det, der driver systemet. Det repræsenterer forskellen mellem det ønskede input V i og den faktiske udgang V ud skaleret med feedbackfaktoren β.
4. Negativ feedback : Nøglekonceptet her er negativ feedback. Når udgangen V ud ændringer på grund af forstyrrelser eller ændringer i input V i fejlsignalet (Vin – βV ud ) oprettes. Det beregnede fejlsignal vil blive forstærket af forstærkeren med forstærkning G og ført tilbage til summeringsforbindelsen. Det er vigtigt, at denne feedback er negativ, fordi den trækkes fra inputtet.
- Hvis V ud øges (dvs. systemets output bliver højere end ønsket) feedbacken reducerer fejlen, der bringer V ud tilbage mod den ønskede værdi.
- Hvis V ud falder (dvs. systemets output bliver lavere end ønsket) feedbacken øger fejlen, der driver V ud tilbage op mod den ønskede værdi.
5. Generel feedback-ligning : Den generelle feedback-ligning for dette system er typisk udtrykt som

Denne ligning relaterer output V ud til indgangen Vin og tilbagekoblingsfaktoren β gennem forstærkerens forstærkning G. Den viser, hvordan systemet bruger negativ feedback til at regulere og styre udgangen, så den matcher det ønskede input.
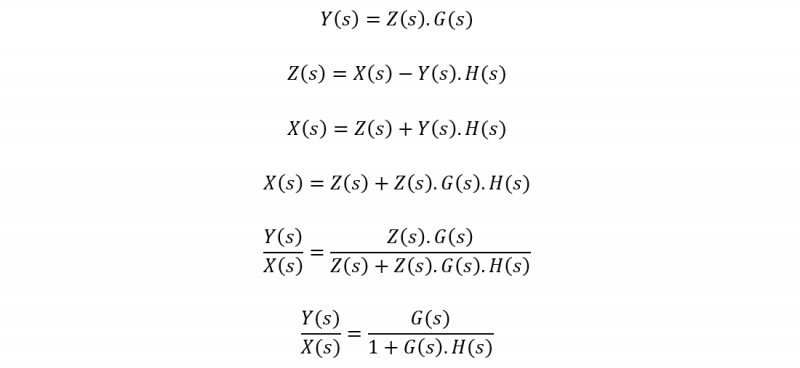
Negativ feedback-overførselsfunktion
Overførselsfunktionen definerer en ligning, der repræsenterer forholdet mellem både input og output. Den fortæller os, hvordan ændringer i inputtet påvirker outputtet. I negativ feedback har vi et mellemsignal repræsenteret ved Z. Dette mellemsignal repræsenterer forskellen mellem output og input.
For overførselsfunktion ligning af negativ feedback, Z bruges til at beregne det fejlsignal eller korrektion, der er nødvendig for at bringe systemet tættere på den ønskede værdi af output.
Det følgende blokdiagram viser det negative feedback-system. Ved hjælp af dette diagram kan vi beregne overførselsfunktionen for et negativt feedback-system:
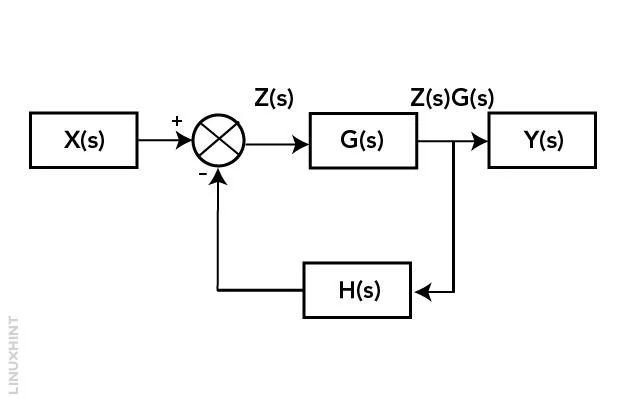
Outputtet af det negative feedback-system er lig med Y(erne):
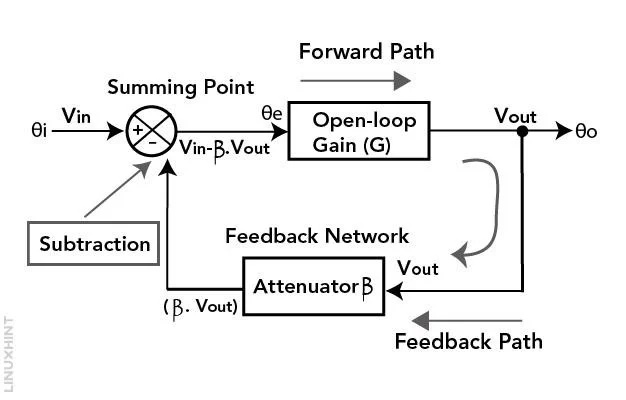
Negativ feedback i operationsforstærkere
I en negativ feedback-konfiguration bliver en del af op-forstærkerens output (V) givet til input-inverterende (-) terminal. Dette udgangssignal vil blive trukket fra inputreferencen. Det hjælper med at kontrollere og stabilisere forstærkerens forstærkning.
Ved at bruge negativ feedback i et op-amp-kredsløb kan du indstille det ønskede forstærkningsniveau, mens du bevarer systemets stabilitet. Negativ feedback reducerer ikke-lineariteter i op-forstærkerens karakteristika, hvilket gør, at den fungerer tættere på den ideelle adfærd.
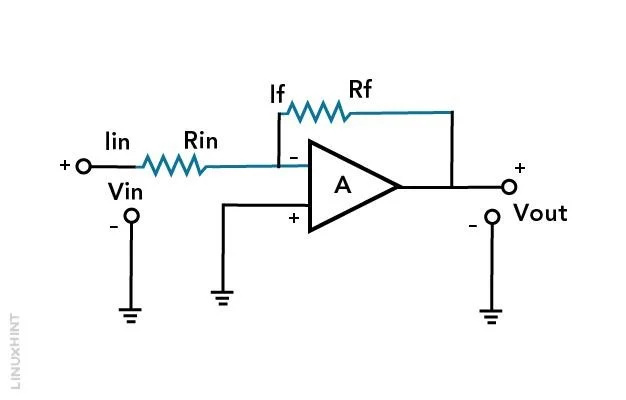
Et negativt feedback operationsforstærker (op-amp) kredsløb er designet ved at bruge en op-amp som den centrale komponent. En op-amp har to indgange: den ene er inverterende (-), og den anden er ikke-inverterende (+). Den har en udgangsterminal. Til det negative feedback-system vil vi bruge den inverterende side af op-forstærkere.
Dette kredsløb inkluderer typisk:
- Indgangsmodstand (Rin), der forbinder den enkelte kilde til den inverterende (-) indgang på op-ampen.
- En feedbackmodstand (Rf), der forbinder op-amp'ens udgang til den inverterende (-) input.
- En forbindelse til belastningen ved op-amp'ens udgang.
Du kan finde forstærkning ved at bruge Rf til Rin-forholdet. Denne negative feedback stabiliserer og kontrollerer op-amp'ens adfærd. Det virker ved at minimere forskellen i spændinger mellem de to inverterende og ikke-inverterende indgange. Det skaber en virtuel kortslutning mellem dem. Som et resultat justerer op-amp sin udgangsspænding for at opretholde denne balance - hvilket gør den til en effektiv forstærker med kontrolleret forstærkning.
Eksempel 1: Beregning af lukket sløjfeforstærkning
Et system har en forstærkning på 60 dB uden feedback. Den negative feedback-brøkdel er 1/20, find lukket sløjfeforstærkning (i dB) med tilføjelse af negativ feedback.
Løsning:
Den lukkede sløjfeforstærkning med negativ feedback er givet af formlen:

I dette tilfælde er forstærkningen med åben sløjfe 60 dB, og feedbackfraktionen er 1/20.

Så med en feedbackfraktion på 1/20 vil systemets lukkede sløjfeforstærkning være 86,02 dB.
Eksempel 2: Beregning af spændingsforstærkning
Hvis en forstærker initialt har en spændingsforstærkning på 3000 (uden feedback) og derefter omfatter en negativ spændingsfeedback med en feedbackfraktion på mv = 0,01. Hvad bliver forstærkerens nye spændingsforstærkning?
Løsning :
Du kan bruge formlen for spændingsforstærkning for forstærkeren med negativ spændingsfeedback - for at beregne forstærkerens spændingsforstærkning:

I ovenstående formel:
EN f = Spændingsforstærkning med feedback
EN = Spændingsforstærkning uden feedback
mv = Feedbackbrøk
Her har vi:
Spændingsforstærkning uden feedback (EN) = 3000
Feedback brøkdel (mv) = 0,01
Indsæt nu disse værdier i formlen:
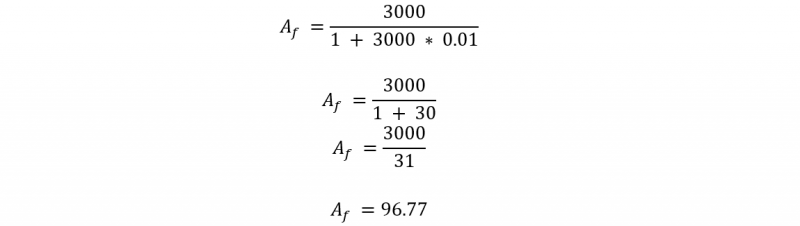
Så spændingsforstærkningen for forstærkeren med negativ spændingsfeedback er cirka 96,77.
Eksempel 3: Beregning af feedbackmodstande
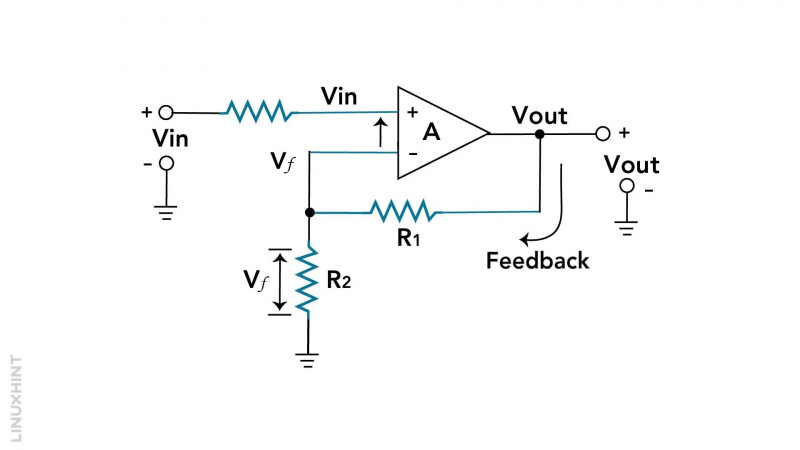
Bestem de passende værdier for feedbackmodstande, R 1 og R 2 . Du skal stabilisere et ikke-inverterende forstærkerkredsløb ved hjælp af en operationsforstærker med en open-loop voltage gain (AVOL) på 220.000. Din målrettede closed-loop gain er 40.
Løsning :
En generel lukket-loop feedback-ligning er:

For at få feedback-brøken β, omarranger ovenstående ligning:
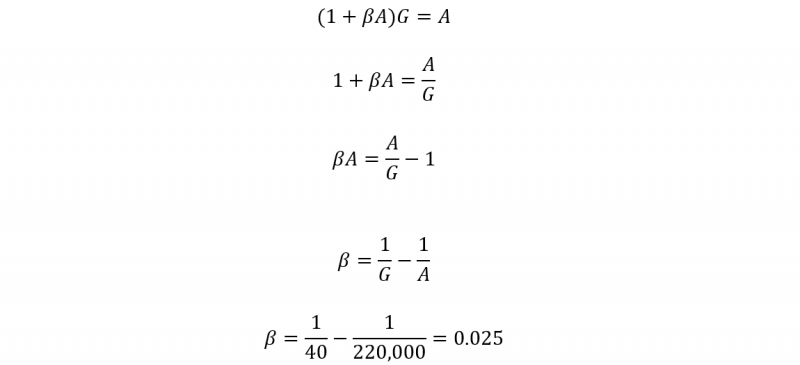
I dette tilfælde er den åbne sløjfeforstærkning for høj. Så feedbackfraktionen β vil være omtrent lig med den reciproke af forstærkning i lukket sløjfe 1/G. Da værdien af 1/A er for lille, omtrent lig med (0,025).
Modstandene R1 og R2 i ovenstående konfiguration danner seriespændingspotentialedelerkredsløbet. Du kan finde den lukkede spændingsforstærkning som følger:

Lad os antage værdien for R2 som 1000 Ω (1 kΩ). Derefter værdien for R 1 kan skrives som
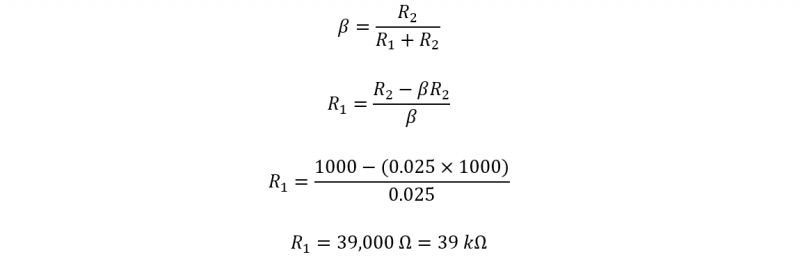
Så for det ikke-inverterende forstærkerkredsløb med en forstærkning på 40 skal du vælge R 1 på 39 kΩ og R 2 på 1 kΩ.
Forskellen mellem positive og negative feedbacksystemer
Du kan finde forskellen mellem de positive og negative feedbacksystemer i nedenstående tabel:
| Feedbacktypeforskelle | Positiv feedback | Negativ feedback |
|---|---|---|
| Definition | I denne feedback tilføjes referencefeedback og inputsignaler. | I denne type trækkes udgangsfeedbacken fra referenceindgangen. |
| Nomenklatur | Positiv feedback eller regenerativ feedback. | Negativ feedback eller degenerativ feedback. |
| Formål | Forstærker eller øger et signal. | Stabiliserer eller regulerer et signal. |
| Effekt på systemet | Kan føre til uforudsigelig adfærd og svingninger. | Fremmer forudsigelighed og steady-state drift. |
| Få retning | Øger systemgevinsten. | Reducerer gevinsten af systemet. |
| Brug | Lydforstærkere og afspændingsoscillatorer. | Operationsforstærkere (Op-Amps), feedback kontrolsystemer. |
| Stabilitet | Fører ofte til ustabilitet. | Forbedrer systemets stabilitet. |
| For eksempel | Schmitt triggere og flip-flops. | Spændingsforstærkere og temperaturregulatorer. |
Anvendelser og egenskaber for negativt feedback-system
Negative feedback-systemer har mange anvendelser inden for almindelig elektronik. Disse systemer forbedrede systemets ustabilitet, systemets linearitet, frekvensrespons og trinrespons. På grund af disse fordele ved negative feedback-systemer har mange forstærkerkredsløb på tværs af elektronik negative feedback-systemer.
Nogle detaljerede beskrivelser af negative feedback-systemer er givet nedenfor:
Stabilitet : Et negativt feedback-system reducerer afvigelserne fra det ønskede punkt, hvilket resulterer i et mere stabilt system. For eksempel sørger en termostat for, at temperaturen forbliver tæt på den valgte værdi.
Nøjagtighed: Negative feedback-systemer forbedrer systemets nøjagtighed ved at minimere fejl. I et forstærkerkredsløb reducerer den negative feedback forvrængningen og producerer et mere stabilt signal ved udgangen.
Båndbreddekontrol : Du kan også styre forstærkerens båndbredde ved hjælp af et negativt feedback-system. Dette gør dem velegnede til flere anvendelser. Disse applikationer inkluderer lydforstærkning til radiofrekvensforstærkning.
Støjreduktion : Negativ feedback kan reducere uønsket støj og interferens. Støjreduktion har flere anvendelsesmuligheder inden for lydsystemer og kommunikationsenheder.
Dynamisk respons : Negative feedback-systemer har dynamisk responsevne. Disse systemer kan tilpasses efter givne forhold. Et eksempel på dynamisk respons omfatter bilens fartpilotsystem.
Effekt af negativ feedback på båndbredde
Båndbredde forklarer driftsfrekvensområdet for en forstærker med konstant forstærkning. Et system med en højere båndbredde betyder, at forstærkeren kan håndtere flere frekvenser. Negativ feedback reducerer forstærkerens forstærkning ved at give output på indgangssiden. Dette forbedrer systemstabiliteten og lineariteten, men reducerer som et resultat også systemforstærkningen.
Det effekt af negativ feedback på båndbredden afhænger af typen og mængden af feedback, der anvendes. Generelt øger negativ feedback båndbredden ved at reducere systemforstærkningen. Forstærkningsbåndbreddeproduktet, som er et mål for ydeevnen af en forstærker, forbliver konstant uanset feedback.
For eksempel , overvej et forstærkerkredsløb uden feedback med en forstærkning på 100 og 10 kHz båndbredde. Anvendelse af negativ feedback for at reducere forstærkningen til 10. Dette vil øge båndbredden til 100 kHz. Forstærkningsbåndbreddeproduktet er stadig 100 × 10 kHz = 1 MHz i begge tilfælde.
Den negative feedback påvirker dog også forstærkerens afskæringsfrekvenser. Det er de frekvenser, hvor systemets gevinster falder fra den maksimale værdi. Negativ feedback sænker cutoff-frekvensen og hæver den øvre cutoff-frekvens. Dette vil resultere i en udvidelse af forstærkerens frekvensgangskurve. Nettoeffekten af negativ feedback på båndbredden er at bytte gevinst for båndbredde.
Det betyder, at anvendelse af negativ feedback vil øge frekvensområdet, som en forstærker kan håndtere. Men alt dette kommer på bekostning af at reducere dens forstærkningsfaktor.
Konklusion
Et negativt feedback-system kan styre eller justere outputtet ved at betjene en del af outputtet på inputsiden. Denne feedback genererer et fejlsignal, som vil give dig et mere stabilt system. Dette fejlsignal er dynamisk og driver hele systemet. Et negativt feedback-system kan forbedre systemets nøjagtighed og også kontrollere båndbredden. Dette feedback-system bruges i forstærkerkredsløb såsom støjreduktion eller fartpilotsystemer. Læs mere om den detaljerede beskrivelse af negativ feedback i denne artikel.