MicroPython er meget udbredt med mikrocontrollere og indlejrede systemer. Vi kan skrive kode og biblioteker inde i MicroPython IDE og forbinde flere sensorer. Denne opskrivning vil guide dig til at måle afstand ved hjælp af ESP32 med HC-SR04 sensor.
ESP32 med HC-SR04 ultralydssensor ved hjælp af MicroPython
At forbinde ESP32 med ultralyd kræver blot, at to ledninger tilsluttes. Ved hjælp af ultralydssensorer kan vi måle objektafstand og kan udløse reaktioner baseret på dette system, såsom systemer til undgåelse af køretøjer.

Ved at bruge MicroPython, som er et designet sprog til ESP32 og andre mikrocontrollere, kan vi forbinde flere sensorer som f. HC-SR04 . Der vil blive skrevet MicroPython-kode, som beregner den tid, det tager SONAR-bølgen at nå fra sensor til objekt og tilbage til objekt. Senere ved hjælp af afstandsformlen kan vi beregne objektafstand.
Her er nogle af de vigtigste højdepunkter ved HC-SR04-sensoren:
| Egenskaber | Værdi |
| Driftsspænding | 5V DC |
| Driftsstrøm | 15mA |
| Driftsfrekvens | 40KHz |
| Min Range | 2 cm/1 tomme |
| Max rækkevidde | 400 cm/13 fod |
| Nøjagtighed | 3 mm |
| Måle vinkel | <15 grader |
HC-SR04 Pinout HC-SR04 indeholder følgende fire stifter:
- Vcc: Tilslut til ESP32 Vin-pin
- Gnd: Opret forbindelse til GND
- Trig: Pin for at modtage styresignal fra ESP32-kort
- Ekko: Send tilbage signal. Microcontroller Board modtager dette signal for at beregne afstand ved hjælp af tid

Sådan virker ultralyd
Efter at HC-SR04-sensoren er forbundet med ESP32 et signal på Trig pin vil blive genereret af bord. Når signalet er modtaget ved trig-pinden på HC-SR04-sensoren, genereres en ultralydsbølge, som forlader sensoren og rammer objektet eller forhindringslegemet. Efter at have ramt vil den hoppe tilbage til objektets overflade.
Når den reflekterede bølge når tilbage til den sensormodtagende ende, genereres en signalimpuls ved ekkostift. ESP32 modtager echo pin-signalet og beregner afstanden mellem objekt og sensor vha Afstandsformel.

Den samlede beregnede afstand skal divideres med to inde i ESP32-koden, da afstanden, vi oprindeligt får, er lig med den samlede afstand fra sensor til objekt og tilbage til sensormodtagerenden. Så reel afstand er det signal, der svarer til halvdelen af denne afstand.
Skematisk
Følgende er skemaet for interface til ESP32 med ultralydssensor:
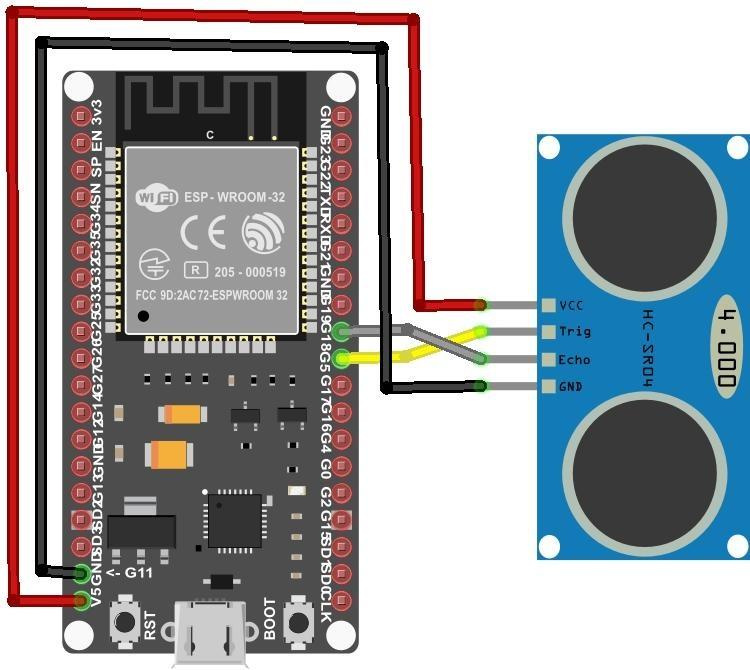
Forbind sensorens trigger og ekkostift med henholdsvis GPIO 5 og GPIO 18 på ESP32. Forbind også ESP32 GND og Vin pin med sensorben.
| HC-SR04 ultralydssensor | ESP32 Pin |
| Trig | GPIO 5 |
| Ekko | GPIO 18 |
| GND | GND |
| VCC | KOMME |
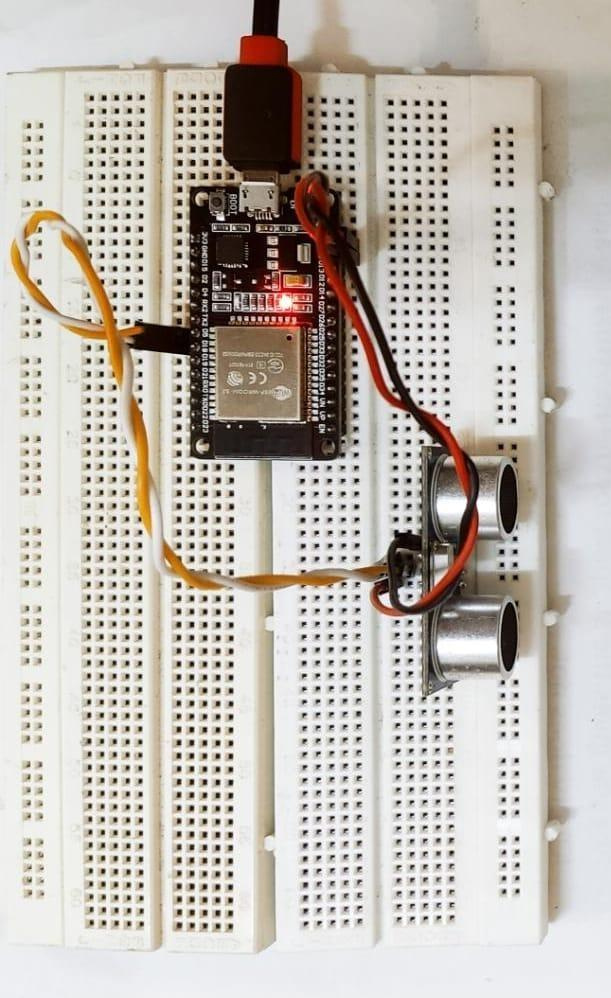
Hardware
Følgende komponenter er nødvendige for at programmere ultralydssensor:
- ESP32
- HC-SR04
- Brødbræt
- Jumper ledninger
Sådan opsætter du Ultrasonic HC-SR04 med ESP32 ved hjælp af MicroPython
Før vi kan programmere ESP32 med en ultralydssensor, skal vi installere et bibliotek i den. Tilslut ESP32-kortet til pc'en. Følg trinene for at fuldføre ESP32-konfiguration med ultralydssensor i Thonny IDE ved hjælp af MicroPython.
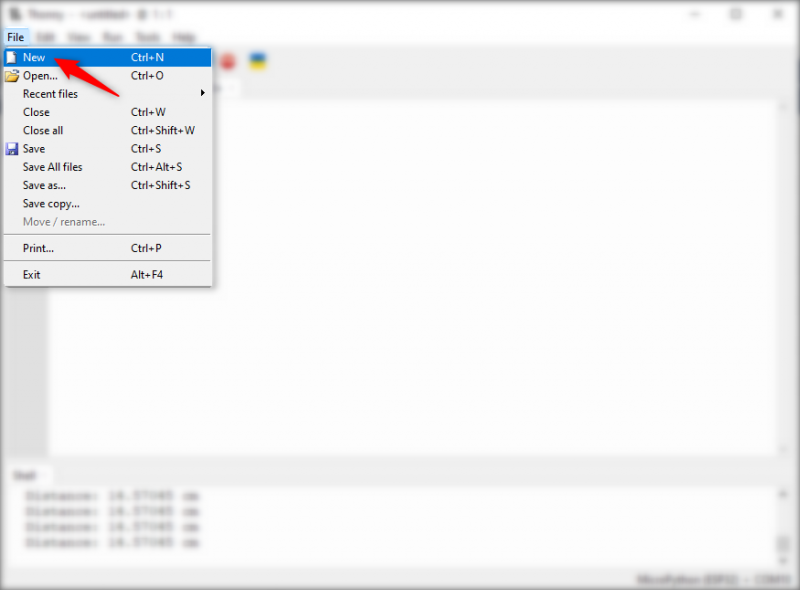
Trin 1: Åbn nu Thonny IDE. Opret en ny fil i editorvinduet Gå til : Fil>Ny eller tryk Ctrl + N .
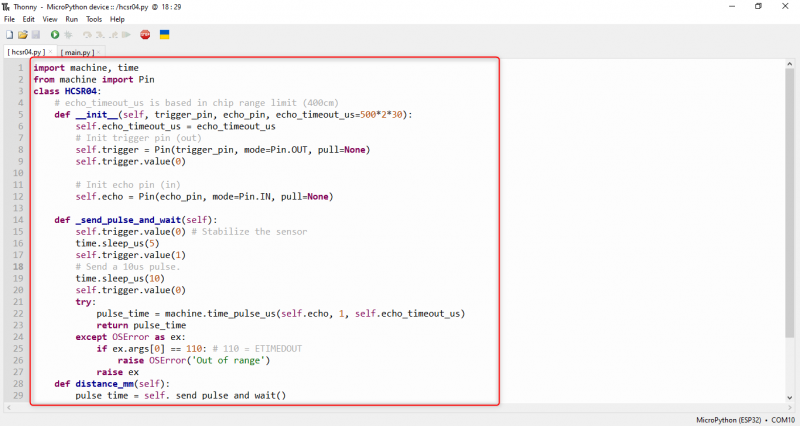
Når den nye fil er åbnet, skal du indsætte følgende kode i Thonny IDE-editorvinduet.
importere maskine , tidfra maskine importere Pin
klasse HCSR04:
# echo_timeout_us er baseret på grænse for chipområde (400 cm)
def __hed__ ( selv , trigger_pin , echo_pin , echo_timeout_us = 500 * to * 30 ) :
selv . echo_timeout_us = echo_timeout_us
# Init trigger pin (ud)
selv . udløser = Pin ( trigger_pin , mode = Pin. UD , trække = Ingen )
selv . udløser . værdi ( 0 )
# Init ekko pin (ind)
selv . ekko = Pin ( echo_pin , mode = Pin. I , trække = Ingen )
def _send_puls_og_vent ( selv ) :
selv . udløser . værdi ( 0 ) # Stabiliser sensoren
tid . sov_os ( 5 )
selv . udløser . værdi ( 1 )
# Send en 10us-puls.
tid . sov_os ( 10 )
selv . udløser . værdi ( 0 )
prøve :
puls_tid = maskine. time_pulse_us ( selv . ekko , 1 , selv . echo_timeout_us )
Vend tilbage puls_tid
undtagen OSError som eks:
hvis eks. args [ 0 ] == 110 : # 110 = ETIMEOUT
hæve OSError ( 'Uden for rækkevidde' )
hæve eks
def afstand_mm ( selv ) :
puls_tid = selv ._send_pulse_and_wait ( )
mm = puls_tid * 100 // 582
Vend tilbage mm
def afstand_cm ( selv ) :
puls_tid = selv ._send_pulse_and_wait ( )
cms = ( puls_tid / to ) / 29.1
Vend tilbage cms
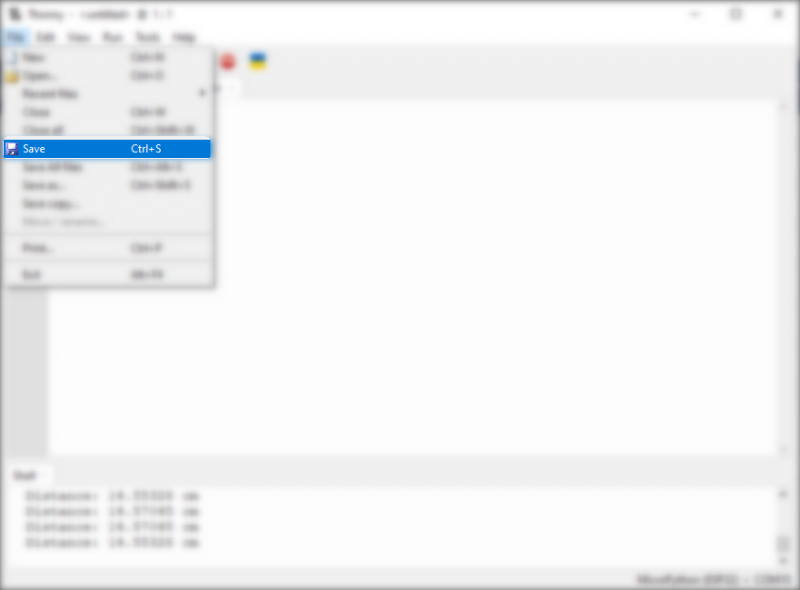
Trin 2: Efter at have skrevet bibliotek kode inde i redigeringsvinduet nu skal vi gemme den inde i MicroPython-enheden.
Trin 3: Gå til : Fil>Gem eller tryk Ctrl + S .
Trin 4: Et nyt vindue vises. Sørg for, at ESP32 er forbundet med pc'en. Vælg MicroPython-enhed for at gemme biblioteksfilen.
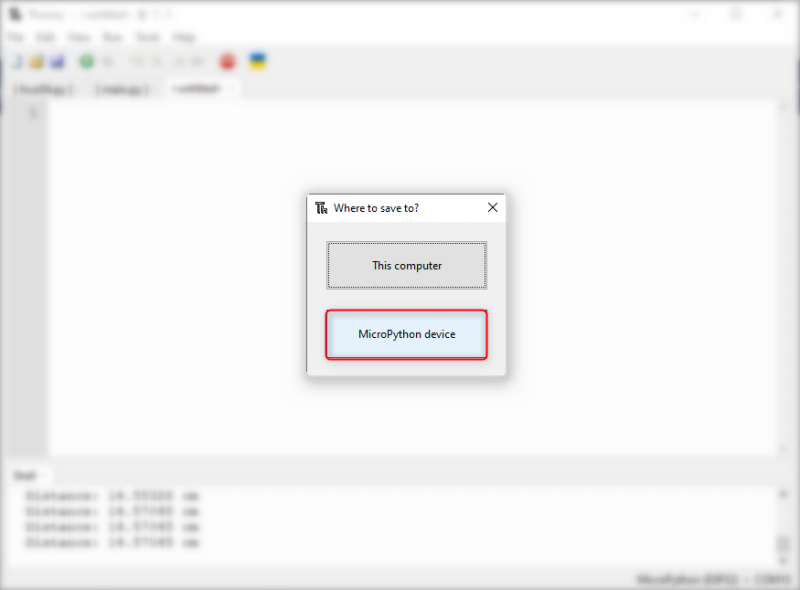
Trin 5: Gem ultralydsbiblioteksfilen med navn hcsr04.py og klik Okay .

Nu er ultralyds-hcsr04-sensorbiblioteket med succes tilføjet til ESP32-kortet. Nu kan vi kalde biblioteksfunktioner inde i kode for at måle afstanden mellem forskellige objekter.
Kode til ultralydssensor ved hjælp af MicroPython
For ultralydssensorkode skal du oprette en ny fil ( Ctrl + N ). Indtast koden nedenfor i redigeringsvinduet og gem den i main.py eller boot.py fil. Denne kode udskriver afstanden for ethvert objekt, der kommer foran HC-SR04.
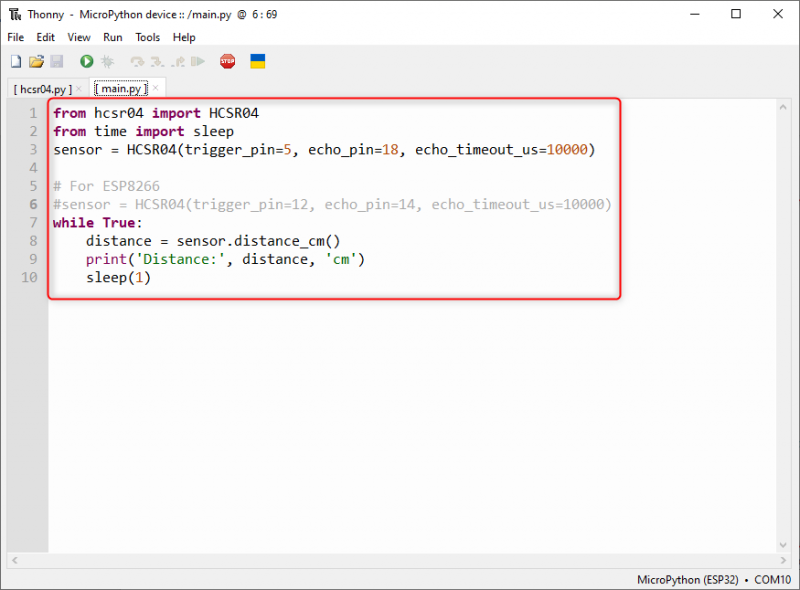
Kode startede med at ringe til vigtige biblioteker som f.eks HCSR04 og tid bibliotek sammen med søvn at give forsinkelser.
Dernæst oprettede vi et nyt objekt med et navn sensor . Dette objekt tager tre forskellige argumenter: trigger, ekko og timeout. Her defineres timeout som den maksimale tid, efter at sensoren går uden for rækkevidde.
sensor = HCSR04 ( trigger_pin = 5 , echo_pin = 18 , echo_timeout_us = 10.000 )At måle og gemme afstand et nyt objekt navngivet afstand er oprettet. Dette objekt vil spare afstand i cm.
afstand = sensor. afstand_cm ( )Skriv følgende kode for at få data i mm.
afstand = sensor. afstand_mm ( )Dernæst udskrev vi resultatet på MicroPython IDE-skallen.
Print ( 'Afstand:' , afstand , 'cm' )Til sidst gives en forsinkelse på 1 sek.
søvn ( 1 )Komplet kode er angivet nedenfor:
fra hcsr04 importere HCSR04fra tid importere søvn
# ESP32
sensor = HCSR04 ( trigger_pin = 5 , echo_pin = 18 , echo_timeout_us = 10.000 )
# ESP8266
#sensor = HCSR04(trigger_pin=12, echo_pin=14, echo_timeout_us=10000)
mens Rigtigt :
afstand = sensor. afstand_cm ( )
Print ( 'Afstand:' , afstand , 'cm' )
søvn ( 1 )
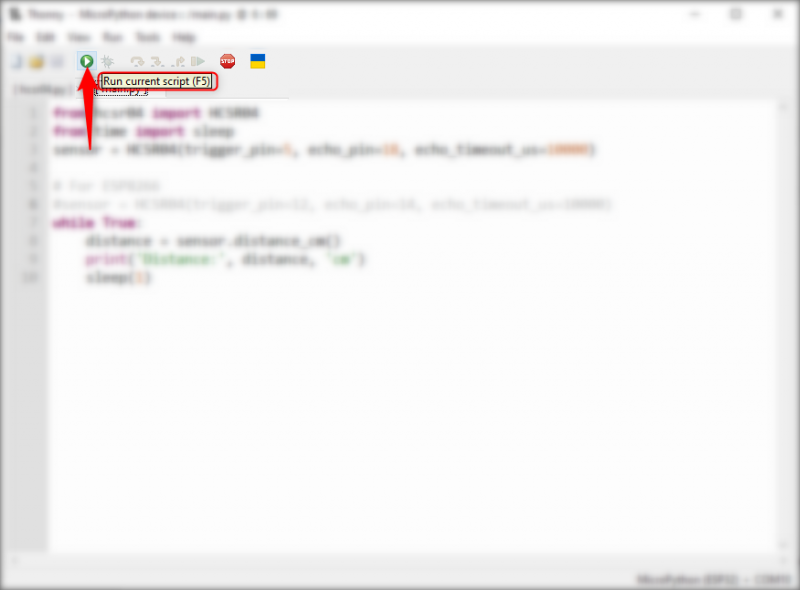
Efter at have skrevet og gemt kode inde i MicroPython-enheden, kører jeg nu ultralydssensoren main.py filkode. Klik på afspilningsknappen, eller tryk på F5 .
Output fra ultralydssensor, når objektet er i nærheden
Placer nu en genstand i nærheden af ultralydssensoren og kontroller den målte afstand på det serielle skærmvindue på Arduino IDE.
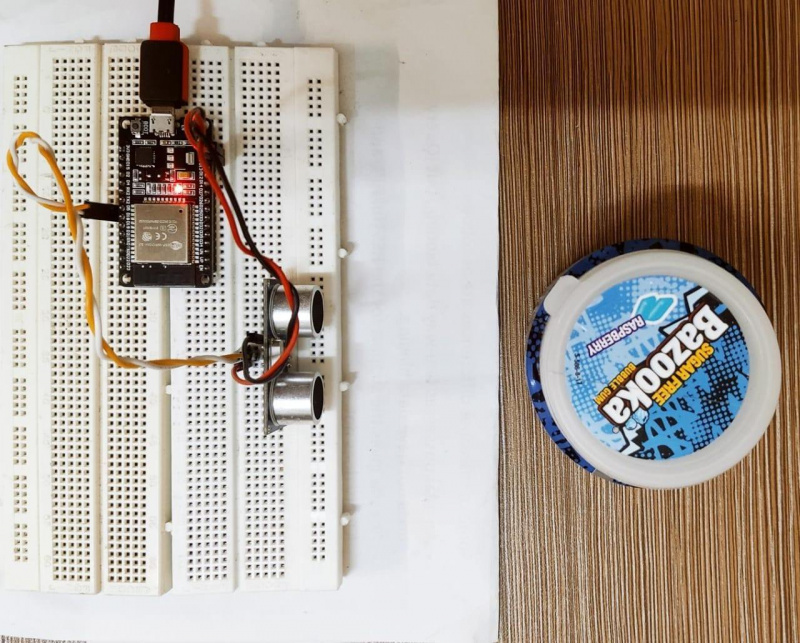
Objektafstand er vist i skalterminalen. Nu placeres objektet 5 cm fra ultralydssensoren.

Output af ultralydssensor, når objektet er langt
For nu at verificere vores resultat vil vi placere genstande langt fra sensoren og kontrollere ultralydssensorens funktion. Placer objekter som vist på billedet nedenfor:
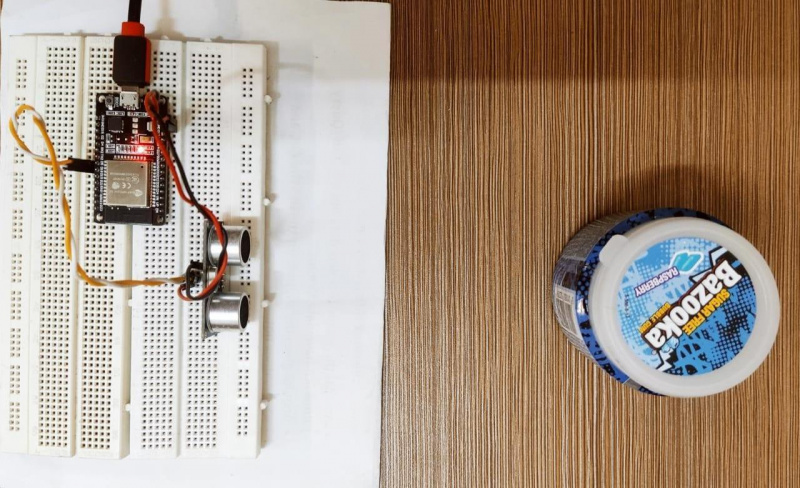
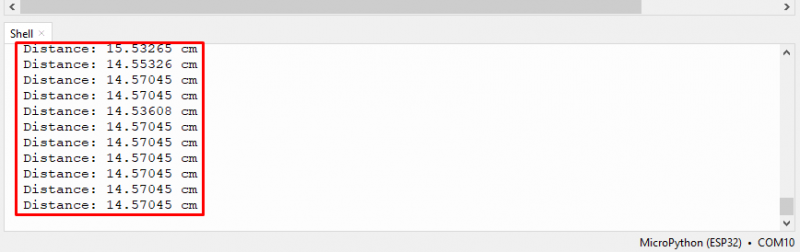
Udgangsvindue vil give os en ny afstand, og som vi kan se, er objektet langt fra sensoren, så den målte afstand er ca. 15 cm fra ultralydssensoren.
Konklusion
Måling af afstand har en fantastisk anvendelse, når det kommer til robotteknologi og andre projekter, der er forskellige måder at måle afstand på. HC-SR04 med ESP32 kan måle afstanden mellem forskellige objekter. Her vil denne opskrivning dække alle de trin, man behøver for at integrere og begynde at måle afstand med ESP32.